Integrating aerospace innovations into equine science
Engineering the Mission
We fuse dynamics and biomechanics modeling, sensing and signal processing to drive precision-driven performance
Modeling
Advanced Gait Representation: Our DYnamics Model for Equine Movement (DYMEM) captures the complex periodic patterns of horse locomotion, from walk to canter to gallop.
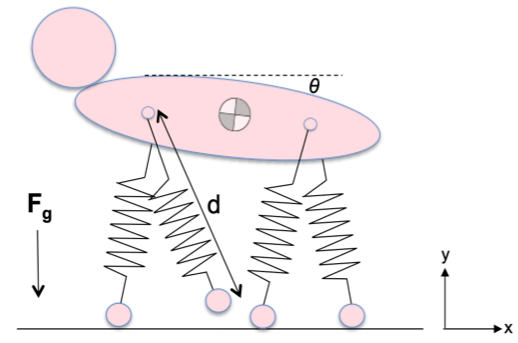
Physics-Based Framework: The horse is modeled as a central mass with dynamic, spring-like legs, enabling realistic simulation of hoof-ground interactions and body motion.
Coupled Oscillator Approach: We apply principles of coupled oscillators — a technique often used to model biological motion — to naturally capture rhythm, stability, and transitions between gaits.
Adaptable to Individual Horses: DYMEM input parameters adjust for variations in horse size, leg length, and leg stiffness, making it applicable across breeds and disciplines.
Ground Reaction Force Modeling: Each leg’s stance, swing, and touchdown dynamics are tracked to accurately determine loading patterns, crucial for performance monitoring and lameness detection.
Validated Against Veterinary Metrics: Our model structure aligns with clinical observations, such as lameness grading and gait asymmetry analysis used in equine sports medicine.
Foundation for Sensor Analytics: DYMEM provides the theoretical underpinning for interpreting accelerometer and video data collected in real-world conditions.
Sensing
Low-Cost, Modular Sensor Design: We developed our prototype lightweight, portable accelerometer system using commercially available components, designed for easy deployment in field conditions without specialized tools.
Continuous, High-Fidelity Motion Capture: Sensors log 3-axis acceleration at a fixed sampling rate optimized to capture hoof impacts, gait cycles, and dynamic body movements relevant for modeling.
Field-Mounted on Equine Boots: Sensors were securely mounted to the fetlock region to track limb motion directly during walking, trotting, and cantering.
Automated Data Logging and Storage: Data are continuously streamed and stored locally on the device, allowing for independent multi-sensor operation without the need for tethered systems.
Synchronization Across Multiple Sensors: Field procedures ensured that data streams from all four limbs could be synchronized for reconstructing full-body motion patterns.
Direct Input into DYMEM: Logged acceleration data serve as direct input for our dynamics model, which models the horse’s body and limbs as a dynamic coupled oscillator system to analyze gait and stability.
Foundation for Advanced Signal Processing: Sensor data streams are processed to extract stride events, oscillatory dynamics, and limb coordination metrics, forming the basis for performance assessment and lameness detection.
Signal Processing
Data Aggregation and Preprocessing: Raw 3-axis acceleration data from all four limbs were compiled into a unified dataset, time-synchronized, and mapped consistently into a fixed sensor coordinate system.
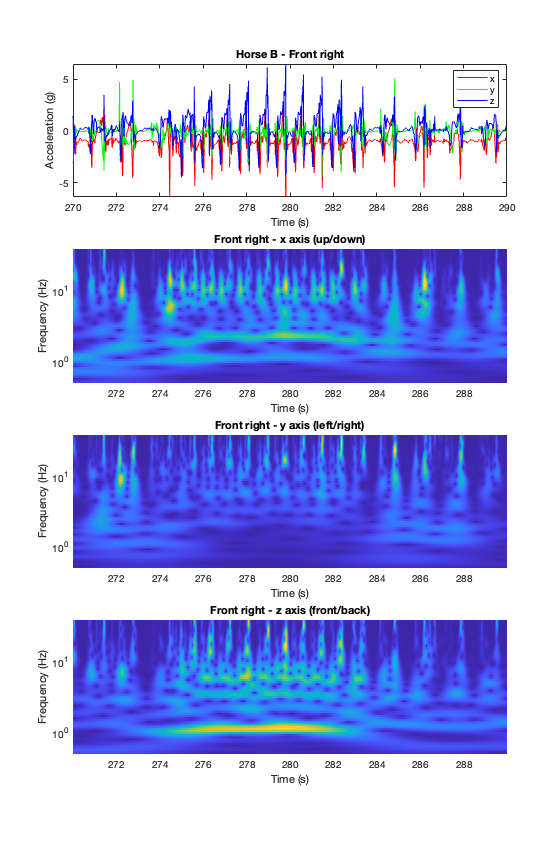
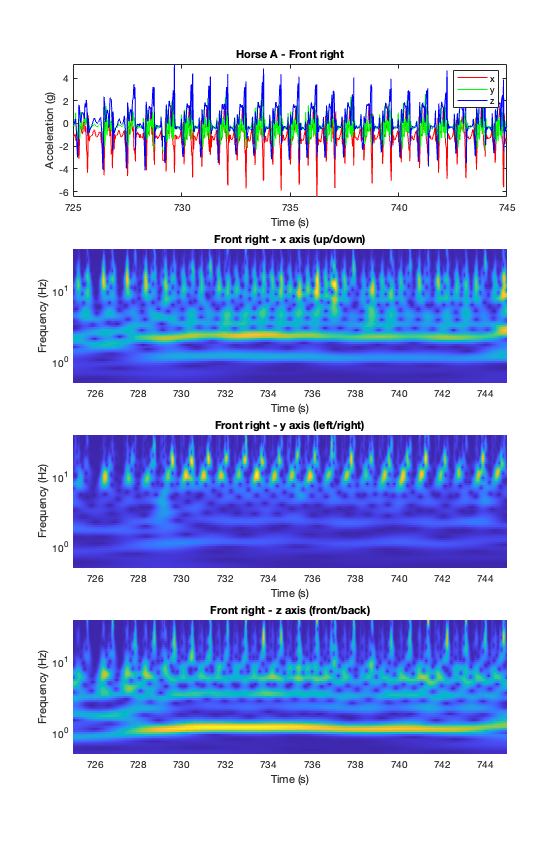
Directional Analysis of Limb Motion: Focused analysis was performed on vertical (x-axis) and front-back (z-axis) accelerations, corresponding to limb motion in the sagittal plane critical for gait assessment.
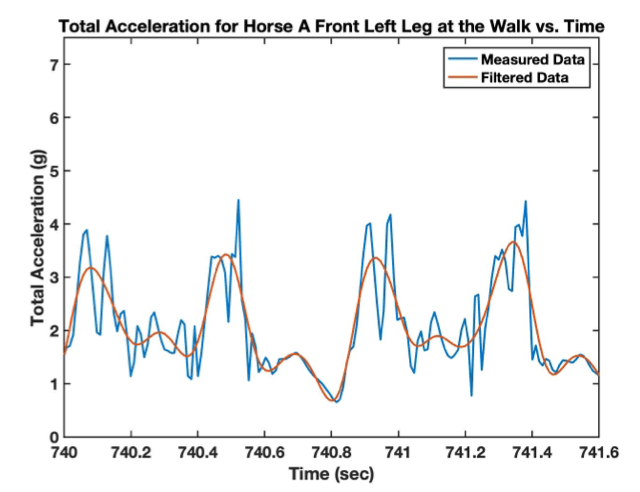
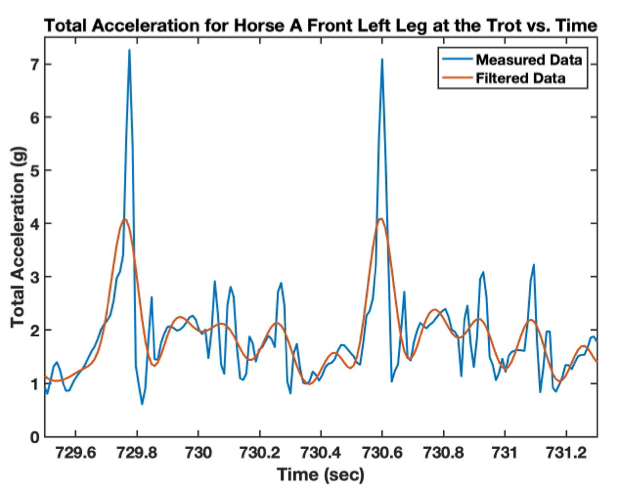
Noise Reduction through Filtering: A lowpass Butterworth filter (27.5 Hz cutoff) was applied to remove high-frequency noise while preserving key gait dynamics at the walk and trot.
Event Identification and Gait Characterization: Temporal features such as stride cycles, peak accelerations, and inter-limb timing were extracted to characterize walking and trotting patterns.
Spectral and Time-Frequency Analysis: Frequency content was evaluated through spectrograms and continuous wavelet transforms to distinguish normal and abnormal gait signatures.
Symmetry and Variance Analysis: Statistical symmetry metrics between parallel limbs (front/front and hind/hind) were computed to detect deviations indicative of potential lameness.
Linking Signal Features to Biomechanical Models: Extracted signal features provided input for DYMEM-based models to correlate limb dynamics with physiological conditions such as soundness or injury.